戴育教仪厂内部网
Language:












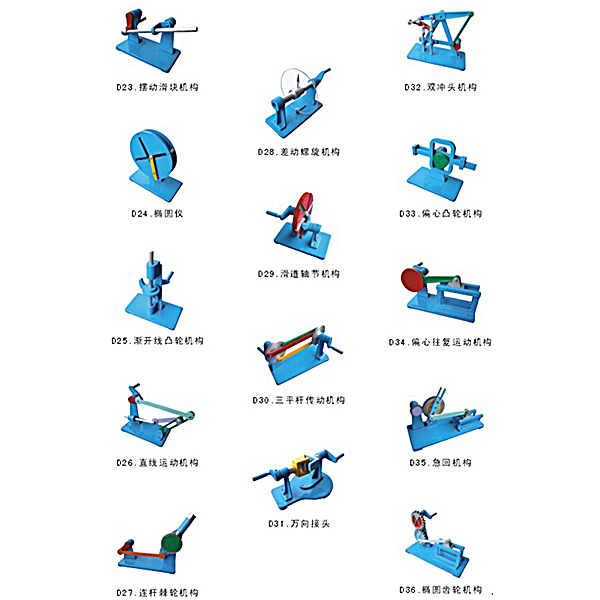


se utiliza para el " Experimento de análisis y topografía de diagramas simplificados de movimiento de mecanismos " en el curso Principios mecánicos . La pieza de trabajo es hermosa y elegante, la precisión del acabado y ensamblaje es alta y los componentes móviles son flexibles y están libres de interferencias. Principales parámetros técnicos: 1. Material del modelo: hecho de material de aleación de aluminio u objeto real. 2. Los componentes móviles tienen un acabado mecánico , con alta precisión de instalación y movimiento flexible del mecanismo. 3. Las placas base y los soportes de cada modelo están pintados de manera uniforme y las partes móviles están codificadas por colores para hacerlas hermosas y elegantes (si hay una placa base). Tipo integral 50 piezas
| D1. Mecanismo de superposición | D26.Mecanismo de movimiento lineal |
| D2. Mecanismo hiperbólico | D27. Mecanismo de trinquete de biela. |
| D3.Mecanismo de polea interior | D28. Mecanismo de tornillo diferencial. |
| D4.Mecanismo de leva en forma de corazón con varilla de empuje de rodillo | D29. Mecanismo de unión del eje deslizante. |
| D5. Mecanismo de transmisión de engranajes helicoidales. | D30.Mecanismo de transmisión de tres varillas planas |
| D6.Reductor | D31.Junta universal |
| D7. Mecanismo intermitente de engranaje. | D32.Mecanismo de doble punzón |
| Mecanismo de tren de engranajes epicicloidal D8.2K | D33. Mecanismo de leva excéntrica. |
| D9. Mecanismo de manivela basculante. | D34. Mecanismo alternativo excéntrico. |
| D10. Mecanismo de muela en forma de corazón. | D35.Regreso de emergencia a la institución |
| D11. Mecanismo de engranaje sectorial. | D36. Mecanismo de engranaje ovalado. |
| D12. Mecanismo de rueda de fricción. | Mecanismo de tren de engranajes epicicloidal D37.2K-H |
| D13. Mecanismo sinusoidal | D38. Mecanismo de transmisión de engranajes de tres velocidades. |
| D14.Mecanismo de rueda de ranura lineal | D39. Mecanismo de transmisión por engranaje helicoidal. |
| D15.Mecanismo planetario | D40. Mecanismo de leva cilíndrico alternativo. |
| D16. Mecanismo de leva de igual diámetro. | D41. Mecanismo de polea. |
| Mecanismo de transmisión de rueda espiral D17.45° | D42.Mecanismo de escalada del robot |
| D18. Mecanismo de transmisión de engranajes rectos cónicos. | D43. Mecanismo de retorno de emergencia de la varilla guía de giro. |
| D19. Mecanismo alternativo de transmisión por engranajes. | D44.Mecanismo de retroalimentación |
| D20. agencia espacial | Mecanismo de transmisión de engranajes helicoidales D45.90° |
| D21.Mecanismo de embrague de seguridad | D46. Diferencial |
| D22. Mecanismo de conexión de engranajes. | D47. Mecanismo de transmisión de eje flexible. |
| D23. Mecanismo deslizante giratorio. | D48. Mecanismo de síntesis de movimiento. |
| D24. | D49. Mecanismo regulador de velocidad excéntrico. |
| D25.Mecanismo de leva involuta | D50. Mecanismo planetario II. |
")
")
")
")
 微信扫码 关注我们
微信扫码 关注我们

24小时咨询热线+86 18916464525

移动电话18916464525
地址:上海市松江科技园区崇南路6号A区414号厂房 备案号: 网站地图