戴育教仪厂内部网
语言选择:
网站首页
实训设备
电气实训
机械工程
车辆维修
流体化工
综合教学
新闻动态
联系我们
实训设备
PRODUCT CENTER
电气实训
机械工程
车辆维修
流体化工
综合教学
推荐产品
自控/计控原理实验箱,自动控制与计算机控
制冷供热控制及监控综合实验装置,制冷制热
空气水地三源热泵实验装置,三源热泵系统实
燃气供暖循环综合实验装置,燃气锅炉热水供
现代制冷与空调系统实训考核装置,制冷技术
空调系统多联机系统实训装置,VRV中央空
智能型制冷压缩机性能测试实训装置
现代制冷与空调系统技能实训装置,制冷维修
新闻动态
垃圾填埋柱实验装置
垃圾发酵实训装置
万能电梯门系统安装实训装置
电梯轿厢拆装实训台
氯消毒原理实训装置
工业污水可生化性实验装置
一机二库系统综合实验台
冰箱空调考核实验装置
填料塔轴向返混性能测定实验台
多釜串联返混性能测定实验台
电动车空调实验台
电动车动力系统示教实训装置
药材粉碎实验台
网络型过程控制考核实验装置
安全钳限速器实验装置
电梯导轨安装与拆装调试实训装置
一体化两相厌氧生物处理反应器实训台
齿轮范成实验装置
楼宇消防自动化系统综合实验台
汽车永磁同步电机性能检测实验装置
电动车超级电容示教实验装置
精选机械设计零件陈列实验装置
车铣加工刀具组合认知实验台
电路原理实训台
通用电子技术实训装置
电机点检实验台
电路分析与电力电子技术实验装置
玻璃热管换热器实验装置
燃气工程教学实训装置
单片机创新实验开发实验台
机械动力学飞轮调速实训装置
机械系统性能研究及参数可视化分析实训台
活性污泥法污水处理实验装置
主页
>
实训设备
>
综合教学
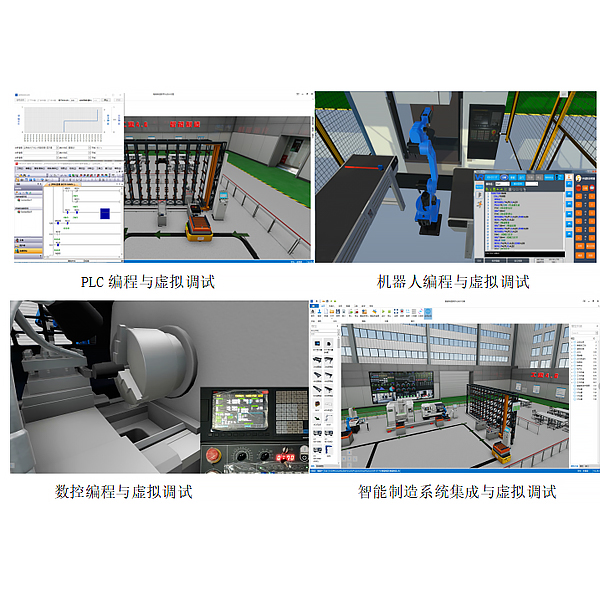
智能制造数字孪生虚拟仿真系统,工业4.0制造虚实结合应用实训仿真软件
发布时间:2024-04-19 17:53
浏览次数:
times
1、软件介绍
该软件是一款三维智能制造虚拟仿真软件,基于海量元素模型,以拖拽方式快速搭建仿真工程。虚拟设备与真实设备具有相同特性,以实际的plc程序、机器人程序、机床数控程序等驱动虚拟设备运行,在虚拟场景中完成整个工程的调试与验证。通过力学物理引擎、达到实际的运行效果。
软件集成了PLC仿真、机器人仿真、智能工厂仿真等功能。提供用户自主建模与自主布局功能,并开放底层接口,支持用户二次开发。是一套工业4.0自动化的综合设计仿真验证平台,并提供了丰富的教学资源。
工业领域应用,在生产线设计的初级概念阶段就可以对整个系统进行完整的分析,包括虚拟调试、节拍验证、风险评估,方案改进,降低项目技术风险。教育领域应用,通过对象虚拟化,解决了工程训练成本高,场景少的问题。可用于大学生竞赛,开放性实验,毕业设计等。
推荐硬件系统配置
为了保证系统流畅地使用,计算机系统的配置要求:
操作系统:Windows 7 SP1 及以上版本
系统类型:64位操作系统
处理器(CPU):≥2.5Ghz(如果使用VR眼镜,≥3.2Ghz)
内存:≥8GB
硬盘:≥5GB
显存: ≥1GB(使用VR眼镜,显存 ≥6GB,如GTX1070)
.Net框架版本:V4.6.2及以上版本
软件特色功能
1.工业4.0系统虚拟集成
包含自主开发模型、自动布局、电气连接设计、编程、虚拟调试,整个系统集成过程。
2.多品牌PLC虚实结合仿真
支持各种主流品牌PLC的半实物仿真(虚实结合)、全虚拟仿真。
3.多品牌机器人虚实结合仿真
支持各种主流品牌工业机器人的半实物仿真(虚实结合)、全虚拟仿真。
4.智能制造虚实结合仿真
除了PLC与工业机器人,扩展了数控机床、机器视觉、AGV、RFID等智能制造所需的元素。
5.MES系统接入
虚拟智能工厂具有MES数据采集接口,能无缝接入工业级MES系统,构建虚拟智能工厂。
6.智能工厂数字孪生
按1:1开发的虚拟生产线与现场生产线实时交换数据,同步运行,构成数字孪生系统。
7.丰富教学资源
开发了PLC、机器人、智能制造系列教学资源,教师授课省时省力。
2、软件主要功能
1.自主布局
面向三维图形,无需编程,用户以拖拽方式快速搭建工程。可以对模型进行移动、旋转、编辑、装配等操作,布局完成后的模型可被各种外设驱动。
2.物理引擎
内置物理引擎,创建的三维模型具有物理属性,能模拟现实生活中的物理现象,如:运动、旋转和弹性碰撞等。在发生碰撞、摩擦、受力的运动模拟中,不同的物理属性能得到不同的运动效果。
3.人机交互
虚拟设备工作由控制设备通过程序驱动,虚拟传感器能反馈场景的状态,赋予了虚拟设备与实际设备相同的特性,还能通过外部真实的控制面板或虚拟设备上的控制面板对虚拟设备进行操作。
4.场景三维操作
通过键鼠能完成平移、旋转、缩放等操作,可快速切换视角。具有三视图功能,支持顶视图、前视图、左视图,可多视角同时查看三维场景。
2、软件主要功能
1.自主布局
面向三维图形,无需编程,用户以拖拽方式快速搭建工程。可以对模型进行移动、旋转、编辑、装配等操作,布局完成后的模型可被各种外设驱动。
2.物理引擎
内置物理引擎,创建的三维模型具有物理属性,能模拟现实生活中的物理现象,如:运动、旋转和弹性碰撞等。在发生碰撞、摩擦、受力的运动模拟中,不同的物理属性能得到不同的运动效果。
3.人机交互
虚拟设备工作由控制设备通过程序驱动,虚拟传感器能反馈场景的状态,赋予了虚拟设备与实际设备相同的特性,还能通过外部真实的控制面板或虚拟设备上的控制面板对虚拟设备进行操作。
4.场景三维操作
通过键鼠能完成平移、旋转、缩放等操作,可快速切换视角。具有三视图功能,支持顶视图、前视图、左视图,可多视角同时查看三维场景。
5.仿真场景操作向导
具有设备介绍功能,点击设备,能显示设备的详细信息,设备信息可编辑。具有操作引导功能,引导使用者逐步完成操作,每一步操作都有相应提示,操作步骤可编辑。
6.VR眼镜体验
实现沉浸式虚拟现实3D体验,包含逼真工业现场3D音效仿真,使体验者身临其境。通过手柄可与场景进行互动操作。
7.多授权模式
支持网络授权模式与加密狗授权模式。
8.在线更新
软件从云端检测是否有新版本,并提示相应操作。3D模型支持云端更新,软件可查看云端模型并可在仿真场景内使用。
9.海量模型
包含一组完整且典型的工业设备的模型库,在仿真场景中可直接拖拽使用,并可设置模型的参数。包含主流品牌工业机器人、传送带、气动件、电机、按钮开关、传感器、视觉相机、数控机床、立体仓库、AGV、机器人夹具等。
10.模型开发
从外部CAD文件导入3D部件,在软件里赋予其参数和运动特性,生成用户自主开发的虚拟设备,虚拟设备能被外部控制器驱动,如PLC、机器人示教器等。导入3D文件格式支持: STEP、STP、OBJ、FBX、STL等。
11.外设端口映射
仿真场景的虚拟设备通过多种通讯协议与外部控制器进行数据交换,支持Modbus-RTU、Modbus-TCP、OPC UA、S7等总线通讯协议。通过设备数据映射表,把外部控制器端口与三维模型的内部端口建立映射关系,因此外部控制器能驱动虚拟设备工作,用户可自行修改数据映射表。
12.电气系统集成
用于电气信号连接图设计,仿真场景的电气主控器件与被控制器件都有一个对应的电气符号,电气符号用图形表示,有名称与内部端口号。用画线方式连接不同端口,不同类型端口用不同颜色线条表示,完成电气信号连接图后可导出Excel格式的IO表。
13.自动考评
软件具有数据实时采集与分析、自动评分功能。先由教师在软件上出题,自动生成评分规则,学员在考核过程中,软件实时记录学员的操作过程、执行结果、异常事件,并根据考试评分规则计算*终成绩,减轻教师批改工作量,提升教学质量。
15.硬件PLC仿真
软件支持三菱、西门子等主流品牌的硬件PLC,与硬件PLC总线通讯,实时读取PLC信号,硬件PLC实时驱动仿真场景的虚拟设备运行。
16.虚拟PLC仿真
软件支持三菱、西门子等主流品牌的虚拟PLC仿真器,虚拟PLC实时驱动仿真场景的虚拟设备运行,PLC编程开发软件能下载PLC程序、实时监视虚拟PLC的程序运行。
17.组态软件调试
组态软件开发的模拟人机界面,可控制虚拟PLC,对仿真场景的虚拟设备进行操作。
18.基于CAD数据轨迹设计
机器人运动轨迹可基于CAD数据,简化轨迹生成过程,提高精度,利用工件模型可直接生成运动轨迹。支持通用CAD文件:stp、step等。
19.机器人离线编程
支持ABB、KUKA、Funac、安川、以及国内外主流品牌的工业机器人的离线编程操作。可导入工件三维模型并进行轨迹规划,采用优化的空间正逆解算法仿真运动过程,一键即可完成复杂的编程过程。通过后置代码功能,直接生成各品牌的机器人代码,简化工业机器人编程过程。
20.碰撞检测
能检测机器人两个部件之间的碰撞,碰撞时两个部件颜色自动变成红色,同时记录碰撞日志,日志包括碰撞设备名称、位置、时间。
21.轨迹优化
离线编程时提供多种轨迹优化工具:碰撞检测工具检查仿真运行时是否发生过碰撞,防止真实应用时发生危险;轨迹分析工具对工业机器人的可达性、姿态奇异点、轴超限、节拍估算进行检查,方便设计人员对机器人轨迹进行调整,避免实际运行时无故停机;机器人3D工作范围球能直观显示机器人的工作范围和*小工作范围,提高调试效率。
22.丰富的工艺工具包
提供了多种工艺工具包:根据需求自定义工具模型和坐标参数,满足个性化工作站设计要求。通过多点智能匹配算法实现虚拟设计环境与真实应用环境的坐标变换,在轨迹轮廓不变的情况下对所有标志点进行变换,提高适应性。集成了机器人码垛、机器人上下料、机器人焊接等典型工艺应用。
23.机器人拖动示教
支持拖动机器人法兰末端或工具末端进行平移操作与旋转操作获取空间点位,空间点位可打开或关闭显示,并可移动点位。
24.虚拟示教器编程
内置机器人虚拟示教器,功能、界面与真实的示教器一致。虚拟示教器程序驱动机器人运动与IO操作,完成机器人编程、运动仿真、机器人工艺训练等功能。
25.硬件示教器编程
真实示教器通过以太网总线接入软件,在硬件示教器上完成机器人编程并控制虚拟机器人运动,完成各种机器人虚实结合仿真。在保证操作安全的***不影响操作体验。
26.多机器人同时仿真
支持多种类型机器人,如直角机器人、SCARA机器人、4轴串联机器人、6轴串联机器人,每台机器人都有独立的运动控制器,分别编程,独立运行。支持多品牌、多类型的机器人同时仿真运行。
27.机器视觉仿真
仿真场景中的虚拟相机,能与外部机器视觉软件实时数据交换,组成机器视觉系统,实现对虚拟工件的在线视觉检测。机器视觉软件与虚拟机器人总线通讯,把工件坐标传给虚拟机器人,引导虚拟机器人抓取工件。
28.AGV仿真
虚拟AGV小车具有与实体AGV小车相同的特性,支持AGV循迹,站点停靠等操作。
29.RFID仿真
具有虚拟RFID读卡器与虚拟RFID标签,RFID读卡器能对RFID标签读取与写入操作。PLC能读取虚拟RFID读卡器信息。
30.数控切削仿真
支持数控机床切削仿真,包括车加工和铣加工。工件根据实际的G代码执行动态切削加工,并辅以切屑、冷却液等效果。配合虚拟测头,支持虚拟在线测量。
31.MES系统接入
MES系统是智能制造生产系统的核心组成部分,与生产线系统实时数据交互。虚拟生产线与物理生产线具有相同的接口,虚拟生产线的机器人、PLC、机床、工作站、立体仓库等设备运行状态能被MES系统实时采集,并接收MES生产指令,构建完整的工业4.0智能制造开发仿真环境。
32.数字孪生功能
按实际设备特性开发的虚拟设备,按1:1布局生产线,虚拟生产线与实际生产线通过端口映射设置实时交互数据,并保持同步运行,构成数字孪生功能。可以在虚拟生产线中完成性能分析与优化。
33.支持云端实验
可与配套的教学资源网站完成在线实验,步骤包括但不限于:课件学习、视频学习、在线做仿真实验、工程下载、工程打开、开始考试、完成考试自动考评、上传考试结果。
34.课程资源一体化集成
基于软件平台开发的课程资源,包括知识点、课件、微课视频、三维场景、参考程序、自动考核试卷等,通过标准格式导入到软件平台上,形成新形态互动一体化教材。相比传统教材,通过知识点,微课视频,三维场景互动操作等,提高学习效率。
35.仿真实验资源
提供PLC基础实验仿真项目21个,工业机器人工作站仿真项目4个,智能制造生产线仿真实验10个。
36.用电安全与触电急救虚拟仿真系统
软件采用二维与三维结合的虚拟画面,教导学生用电的安全和急救方法,软件内设有单相触电、两相触电、跨步触电、低压触电急救、高压触电急救、人工呼吸救护法、牵手呼吸救护法、胸外心脏按压就护法等原理讲解与教学,单相触电分维修带电断线、维修插座触电、室外触电等原理演示。低压触电和高压触电教学主要为学生讲解演示如何解救处于低压触电或者高压触电时的人,人工呼吸救护法、牵手呼吸救护法、胸外心脏按压就护法采用采用3D虚拟仿真技术展示,经过渲染和润色,使模型看起来与真实部件一般无二,画面逼真。通过实训能够对学生进行实训室安全用电教育,提高学生的安全意识,使学生学会一些自救的方法,让学生在遇到危险时能采取一定的安全措施,保护自己,以及熟悉各种电气事故产生的原因和处理电气事故的实用操作措施,减少电气事故的发生。
37.机械装配与钳工装配虚拟仿真软件
基于unity3d设计,用户自行根据电脑配置选择不同的交互界面大小,可选六级画质等级。可选圆柱齿轮轴系部件4种、锥齿轮轴系部件4种、蜗杆轴系部件6种进行安装、拆卸、装配、零部件测量(分为轴测量与底座测量)、考核等。零件拆装的步骤过程中有智能提醒,由学生手动选择对应的零件并移动至轴系结构上,选择顺序正确零件才能安装上去,软件内的模型均采用3D模型,由3Dmax制作而成,并经过渲染和润色,使模型看起来与真实部件一般无二,设有非标零件库(8种零件)、标准零件库(12种零件)、测量工具库(钢直尺、游标卡尺)供拆装选择。软件内配有实验的目的、步骤、要求等集成的电子实验考核题及指导书。使用考核功能时,出题供学生回答,当学生答完题目时给出考核分数,共12题,每道题目设为8分(其中一题为多选题,占12分),只有选择了答案才能进行下一题。软件需能进行全方位旋转、放大、缩小观看其细节。软件须为整体同一平台,不得以单独的资源展现。
38.机械实训安全教育虚拟仿真软件:本软件基于unity3d开发,可布置到云服务器端,也可在本地环境使用,软件采用三维漫游的形式,可通过键盘控制移动,鼠标控制镜头方向,设有机械安全距离实验,机械安全保护装置实验、机械安全防护设计基础考核,实验进行时,三维漫游画面采用箭头与脚印图案提示移动至实验位置,机械对象周围圆圈显示了工作半径,实验过程伴有三维机器人的对话框提醒。
A、机械安全距离实验内容包括防止上下肢触及危险区的安全距离实验(内分2种围栏高度与开口大小),选择进入后,镜头前弹出GB23821-2009《机械安全防止上下肢触及危险区的安全距离》要求,错误示范:实验过程为人体进入机械对象工作半径受到伤害后,血色画面与语音提醒收到机械伤害,并回至原位并进行下一实验,*终一步为正确做法。
B、机械安全保护装置实验分为安全联锁开关、安全光幕、安全垫、安全激光扫描仪等保护装置实验,可选类别(安全输入、安全控制、安全输出、其他)、生产厂家、产品列表(安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、安全护栏)。安装位置有蓝色闪烁框架提醒,实验流程:选择安全护栏并安装、选择安全连锁开关(或选择安全光幕、安全垫、安全激光扫描仪)并安装、选择安全控制器并安装至电气控制箱、选择安全继电器并安装至电气控制箱、点击电气控制箱上的启动按钮。若进入危险区域时,系统将提示报警音,且机械对象停止工作,选择电气控制箱上的复位按钮可停止。
C、机械安全防护设计基础考核要求完成机械安全系统的安装,正确安装安全护栏、安全联锁开关、安全光幕、安全垫、安全激光扫描仪、安全控制器、安全继电器、24V电源、信号灯及急停按钮,考核分为十个考核点,部分考核点有3个选项,由学生自由选择,*终10项考核点选好后,提交确认,系统自动得出总分数以及各考核点的得分情况。
D、软件须为整体同一平台,不得以单独的资源展现。
上一篇:半实物PLC虚拟仿真教学软件,虚实结合PLC虚拟仿真系统
下一篇:电梯安装仿真实训软件,电梯安装虚拟仿真教学软件
友情链接:
实训设备
电气实训
机械工程
车辆维修
流体化工
综合教学
PTODUCTO
新闻动态
微信扫码 关注我们
24小时咨询热线
+86 18916464525
移动电话
18916464525
地址:上海市松江科技园区崇南路6号A区414号厂房 备案号:
网站地图
在线咨询
微信
+86 18916464525
TOP